Радиолокация
Содержание:
Содержание
Skill
Применение радиолокаторов
Впервые радиолокационные станции начали применяться во время Второй мировой войны для обнаружения военных самолётов, кораблей и подводных лодок.
Так в конце декабря 1943 г. радиолокаторы, установленные на английских кораблях, помогли обнаружить фашистский линкор, вышедший ночью из порта Альтенфиорд в Норвегии, чтобы перехватить военные суда. Огонь по линкору вёлся очень точно, и вскоре он пошёл ко дну.
Первые РЛС были не очень совершенными, в отличие от современных, надёжно защищающих воздушное пространство от воздушных налётов и ракетного нападения, распознающих практически любые военные объекты на суше и на море. Радиолокационное наведение применяется в самонаводящихся ракетах для распознавания местности. РЛС осуществляют слежение за полётами межконтинентальных ракет.
РЛС нашли своё применение и в мирной жизни. Без них не могут обходиться лоцманы, проводящие корабли через узкие проливы, диспетчеры в аэропортах, руководящие полётами гражданских самолётов. Они незаменимы при плавании в условиях ограниченной видимости – ночью или при плохой погоде. С их помощью определяют рельеф дна морей и океанов, исследуют загрязнения их поверхностей. Их используют метеорологи для определения грозовых фронтов, измерения скорости ветра и облаков. На рыболовных судах радиолокаторы помогают обнаруживать косяки рыбы.
Очень часто радиолокаторы, или радиолокационные станции (РЛС), называют радарами. И хоть сейчас это слово стало самостоятельным, на самом деле это аббревиатура, возникшая из английских слов «radiodetectionandranging», что означает «радиообнаружение и дальнометрия» и отражает суть радиолокации.
- < Назад
- Вперёд >
ВОГ-25/ВОГ-25П и другие 40-мм выстрелы
Вторая молодость
Строительный самосвал ЗИЛ-ММЗ-585Л 1963 года выпуска — сегодня настоящая музейная диковинка. Работали машины на износ — производители не закладывали в них тот ресурс, который они реально отхаживали. А поскольку вся спецтехника в Союзе была ведомственной, за прошедшие 50 лет большинство экземпляров отправились в металлолом. Автомобиль, сохранившейся сегодня в красноярском клубе «Авто-ретро», эта участь миновала по счастливой случайности: после списания он оказался в руках у коллекционера-энтузиаста Павла Мезина.
С этого момента для старенького ЗИЛа началась вторая молодость: сегодня он уже не таскает на себе тяжелые грузы, не переживает кустарных ремонтов, а чинно и степенно путешествует по городским выставкам ретротранспорта, постепенно обретая оригинальный заводской внешний вид.
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.
Дальность действия РЛС
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы.
В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
- Dmax=PnDaSaσ(4π)2Pn.min4{\displaystyle D_{max}={\sqrt{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}},
где:
- Pn{\displaystyle \;P_{n}} — мощность генератора;
- Da{\displaystyle \;D_{a}} — коэффициент направленного действия антенны;
- Sa{\displaystyle \;S_{a}} — эффективная площадь антенны;
- σ{\displaystyle \;\sigma } — эффективная площадь рассеяния цели;
- Pn.min{\displaystyle \;P_{n.min}} — минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Влияние помех
Работа нескольких РЛС в одном частотном диапазоне
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.
Мнимое изображение
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте
Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда.
Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды.
Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
Легкий бронеавтомобиль ФАИ 1933 года
Гражданское применение
В сельском и лесном хозяйстве радиолокационные устройства незаменимы при получении информации о распределении и плотности растительных массивов, изучении структуры, параметров и видов почв, своевременном обнаружении очагов возгораний. В географии и геологии радиолокация используется для выполнения топографических и геоморфологических работ, определения структуры и состава пород, поиска месторождений полезных ископаемых. В гидрологии и океанографии радиолокационными методами осуществляется контроль состояния главных водных артерий страны, снегового и ледяного покрова, картографирование береговой линии.
Радиолокация — это незаменимый помощник метеорологов. РЛС легко выяснит состояние атмосферы на удалении десятков километров, а по анализу полученных данных составляется прогноз изменения погодных условий в той или иной местности.

Первые советские радары
В 1920-е годы ученые в СССР создали импульсную радиолокационную установку и смогли с помощью отраженного радиосигнала измерить расстояние до ионосферы. В 1925 году физики Введенский, Симанов, Халезов и Аренберг указали на возможность применения для радиолокации ультракоротких радиоволн. А в 1934 году в Ленинграде начались первые полноценные опыты с аппаратурой радиообнаружения – в январе радиолокационным методом на расстоянии 600 метров был найден самолет, летящий на высоте 150 метров.
Оборудование было создано в Центральной радиолаборатории группой Ю.К. Коровина при поддержке Ленинградского электротехнического института. Руководил экспериментом военный инженер М.М. Лобанов, который сыграл ключевую роль в становлении радиолокационного направления в промышленности. В том же 1934 году на Ленинградском радиозаводе были выпущены опытные образцы радиолокационных станций (РЛС) «Вега» и «Конус» для системы радиообнаружения самолетов «Электровизор» ученого П.К. Ощепкова. Таким образом, 1934 год можно считать годом рождения первого отечественного радара.
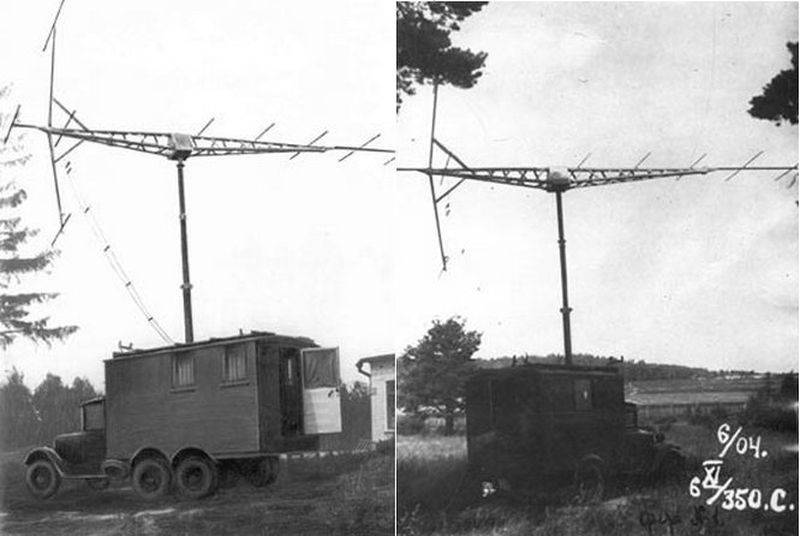
РЛС дальнего обнаружения «РУС-2»
В 1938 году начинается серийное производство РЛС РУС-1 и РУС-2 «Редут», которые станут основой противовоздушной обороны в начале Великой Отечественной войны. Благодаря установленной на крейсере «Молотов» радиолокационной станции были отражены первые атаки немецких бомбардировщиков на Севастополь 22 июня 1941 года. А месяц спустя комплекс РУС-2, расположенный в 100 км от Москвы, обнаружил 200 самолетов, летящих бомбить столицу. Тогда атака была отражена, немцы развернулись, потеряв 22 машины.
В работе над первыми станциями РУС-1 принимал участие выдающийся физик А.А. Пистолькорс, создатель научной школы радиоэлектроники. Станция РУС-2 «Редут» выпускалась на заводе №339 и стала самой массовой РЛС времен войны.
Конструкционно этот грузовик можно разделить на четыре части
ЗИЛ -5301 «Бычок», история появления, его достоинства и недостатки
Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии — изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.

Литература
- Erickson, John; «Radiolocation and the air defense problem: The design and development of Soviet Radar 1934-40», Social Studies of Science, vol. 2, pp. 241—263, 1972
- Ширман Я. Д., Голиков В. Н., Бусыгин И. Н., Костин Г. А. Теоретические основы радиолокации / Ширман Я. Д.. — М.: Советское радио, 1970. — 559 с.
- Справочник по радиолокации / Сколник М.И.. — М., 2014. — 1352 с. — ISBN 978-5-94836-381-3.
- Справочник по радиолокации / Сколник М.И.. — М., 2014. — 1352 с. — ISBN 978-5-94836-381-3.
- Бакут П. А., Большаков И. А., Герасимов Б. М., Курикша А. А., Репин В. Г., Тартаковский Г. П., Широков В. В. Вопросы статистической теории радиолокации. — М.: Советское радио, 1963. — 423 с.
Модификации
ВОГ-25ИН
Индекс ГРАУ — 7П17И
. Практический выстрел с гранатой в инертном снаряжении, применяется для тренировок и обучения стрельбе,а также приведения ГП-25 к нормальному бою и проверке боя.
ВУС-25
(индекс 7П44У) — учебная граната, применяется для тренировок и обучения.
ВОГ-25П
Индекс ГРАУ — 7П24
, шифр «Подкидыш». Выстрел с «подпрыгивающей» осколочной гранатой, оснащённый взрывателемВГМ-П с вышибным зарядом и пиротехническим замедлителем. Принят на вооружение в 1979 году.
При попадании в преграду выстрел подскакивает и взрывается в воздухе на высоте около 1,5 метров. В сравнении с ВОГ-25, «подпрыгивающий» боеприпас позволяет эффективнее поражать лежащего и находящегося в траншее или окопе противника.
Описание:
- Калибр 40 мм
- Начальная скорость 76 м/с
- Масса 275 г
- Масса ВВ 42 г
- Длина 125 мм
- Дистанция взведения 10 — 40 м
- Время самоликвидации не менее 14 с
- Средняя высота разрыва 75 см
«Гвоздь»
40-мм выстрел «Гвоздь»
с газовой гранатой — предназначен для создания газового облака с непереносимо-допустимой концентрацией ирританта (раздражающего вещества) CS. Состоит на вооружении МВД РФ.
40-мм выстрел с дымовой гранатой ВДГ-40 «Нагар»
— применяется для постановки дымовой завесы.
ВОГ-25М
Модернизированный вариант выстрела ВОГ-25 с осколочной гранатой, частично унифицирован с ВОГ-25ПМ. Разработан в начале 2000-х годов.
ВОГ-25ПМ
Модернизированный вариант выстрела ВОГ-25П с «подпрыгивающей» осколочной гранатой, частично унифицирован с ВОГ-25М. Разработан в начале 2000-х годов.
АСЗ-40
40-мм выстрел акустического действия АСЗ-40 «Свирель»
. Светозвуковая граната нелетального действия служит для временного подавления психоволевой устойчивости живой силы противника. Состоит на вооружении МВД РФ.
В настоящее время имеет место тенденция к дальнейшему расширению типов боеприпасов. Так, на международной оружейной выставке «Defendory-2006» были представлены новые виды гранат:
- ВГ-40МД — выстрел с дымовой гранатой
- ВГС-40-1 — выстрел с сигнальной гранатой (красный огонь)
- ВГС-40-2 — выстрел с сигнальной гранатой (зеленый огонь)
- ВГ-40И — выстрел с осветительной гранатой
Однако нет сведений, что эти боеприпасы были приняты на вооружение или находятся в серийном производстве.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 масштабных азимутальных меток (для старых систем) или 16384 улучшенных масштабных азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а масштабные азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С. Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта масштабных азимутальных меток.
Российский внедорожник ГАЗ-3106
Опыты с электромагнитными волнами Г.Герца и А.Попова
В 1888 г. выдающийся немецкий учёный Генрих Герц опытным путём подтвердил существование электромагнитных волн. Опыты Герца заключались в отражении луча рефлектора от металлического листа, установленного на его пути. Отражаясь от него, луч попадал к приёмнику и «сигнализировал» о своём существовании. Стоило убрать лист — сигнализация прекращалась.
 Генрих Рудольф Герц
Генрих Рудольф Герц
Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами
И прежде всего внимание учёного здесь привлекло само существование известных раннее лишь в теории электромагнитных волн. Но он даже и не задумался о каком-либо практическом применении свойств этих волн — направленности и отражении
Спустя немного времени, наш соотечественник А.С. Попов впервые нашёл практическое применение для электромагнитных волн, создав грозоотметчик (приёмник электромагнитных волн природного происхождения, который лёг в основу появившегося после радио). Позже А.С
Попов сделал ещё одно важное открытие: в 1897 году во время опытов по радиосвязи на Балтийском море зарегистрировал влияние корабля, пересекающего трассу радиоволн, на силу сигнала
В своём отчете о проведении опытов учёный писал следующее:
 Александр Степанович Попов
Александр Степанович Попов
Радиолокация
- Подробности
- Просмотров: 411
«Физика — 11 класс»
Обнаружение и точное определение местонахождения объектов с помощью радиоволн называют радиолокацией.
Радиолокационная установка — радиолокатор (или радар) — состоит из передающей и приемной частей.
В радиолокации используют электрические колебания сверхвысокой частоты (108 — 1011 Гц).
Мощный генератор СВЧ связан с антенной, которая излучает остронаправленную волну.
В радиолокаторах, работающих на длинах волн порядка 10 см и меньше, такая волна создается антеннами в виде параболических зеркал.
Для волн метрового диапазона антенны имеют вид сложных систем вибраторов.
При этом острая направленность излучения получается вследствие сложения волн.
Антенна устроена так, что волны, посланные каждым из вибраторов, при сложении взаимно усиливают друг друга лишь в заданном направлении.
В остальных направлениях происходит полное или частичное их взаимное гашение.
Отраженная волна улавливается либо той же излучающей антенной, либо другой приемной антенной, тоже остронаправленной.
Строгая направленность излучения позволяет говорить о луче радиолокатора.
Направление на объект и определяется как направление луча в момент приема отраженного сигнала.
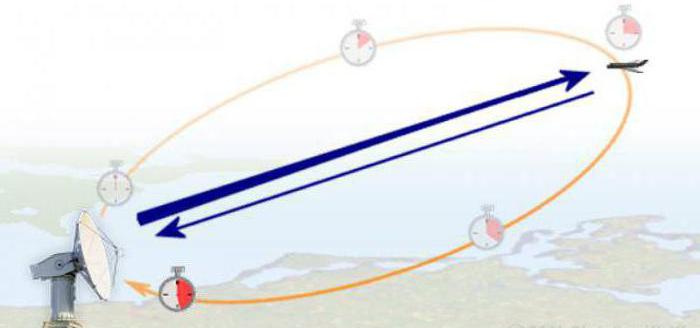
Для определения расстояния до цели применяют импульсный режим излучения.
Передатчик излучает волны кратковременными импульсами.
Длительность каждого импульса составляет миллионные доли секунды, а промежуток между импульсами примерно в 1000 раз больше.
Во время пауз принимаются отраженные волны.
Определение расстояния R проводится путем измерения общего времени t прохождения радиоволн до цели и обратно.
Так как скорость радиоволн с = 3 • 108 м/с в атмосфере практически постоянна на всем пути луча, то
Вследствие рассеяния радиоволн до приемника доходит лишь ничтожная часть той энергии, которую излучает передатчик.
Потому приемники радиолокаторов усиливают принятый сигнал в миллионы миллионов раз (1012).
Такой чувствительный приемник, разумеется, должен быть отключен на время посылки импульса передатчиком.
Для фиксации посланного и отраженного сигналов используют электронно-лучевую трубку.
В момент посылки импульса светлая точка, равномерно движущаяся по экрану электронно-лучевой трубки, отклоняется.
На экране появляется всплеск около нулевой отметки шкалы дальности.
Светящееся пятнышко на экране продолжает равномерно двигаться вдоль шкалы и в момент приема слабого отраженного сигнала снова отклоняется.
Расстояние между всплесками на экране пропорционально времени t прохождения сигнала и, следовательно, расстоянию R до цели.
Это позволяет проградуировать шкалу непосредственно в километрах.
Радиолокационные установки обнаруживают корабли и самолеты на расстояниях до нескольких сот километров.
На их работу лишь незначительно влияют условия погоды и время суток.
В больших аэропортах локаторы следят за взлетающими и идущими на посадку самолетами.
Наземная служба передает по радио пилотам необходимые указания и таким образом обеспечивает безопасность полетов.
Корабли и самолеты также снабжены радиолокаторами, служащими для навигационных целей.
Такие локаторы создают на экране картину расположения объектов, рассеивающих радиоволны, и оператор видит радиолокационную карту местности.
В настоящее время применение радиолокации становится все более разнообразным.
С помощью локаторов наблюдают метеоры в верхних слоях атмосферы.
Локаторы используются службой погоды для наблюдения за обланами.
Локаторы используются в космических исследованиях.
Каждый космический корабль обязательно имеет на борту несколько радиолокаторов.
В 1946 г. в США и Венгрии был осуществлен эксперимент по приему сигнала, отраженного от поверхности Луны.
В 1961 г. учеными нашей страны произведена радиолокация планеты Венера, что позволило оценить период ее вращения вокруг своей оси.
В настоящее время осуществлена локация и других планет Солнечной системы.
Радиолокаторы используются для обнаружения самолетов и кораблей, в службе погоды, для локации планет и др.
Следующая страница «Понятие о телевидении. Развитие средств связи»
Назад в раздел «Физика — 11 класс, учебник Мякишев, Буховцев, Чаругин»
Электромагнитные волны. Физика, учебник для 11 класса — Класс!ная физика
Что такое электромагнитная волна —
Экспериментальное обнаружение электромагнитных волн —
Плотность потока электромагнитного излучения —
Изобретение радио А. С. Поповым. Принципы радиосвязи —
Модуляция и детектирование —
Свойства электромагнитных волн —
Распространение радиоволн —
Радиолокация —
Понятие о телевидении. Развитие средств связи —
Краткие итоги главы