Основное уравнение радиолокации
Содержание:
Двигатель — агрегат, приводящий автомобиль в движение
Случайные
Что такое АРУ в приемнике?
Принимаемая мощность
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
Основные методы радиолокации
РЛС непрерывного излучения
Используются в основном для определения радиальной скорости движущегося объекта (использует эффект Доплера). Достоинством РЛС такого типа является дешевизна и простота использования, однако в таких РЛС сильно затруднено измерение расстояния до объекта.
Пример: простейший радар для определения скорости автомобиля.
Импульсный метод радиолокации
При импульсном методе радиолокации передатчики генерируют колебания в виде кратковременных импульсов, за которыми следуют сравнительно длительные паузы. Причём длительность паузы выбирается исходя из дальности действия РЛС Dmax.
T>2Dmaxc{\displaystyle T>{2D_{max} \over c}}
Сущность метода состоит в следующем:
Передающее устройство РЛС излучает энергию не непрерывно, а кратковременно, строго периодически повторяющимися импульсами, в паузах между которыми происходит приём отражённых импульсов приёмным устройством той же РЛС.
Таким образом, импульсная работа РЛС даёт возможность разделить во времени мощный зондирующий импульс, излучаемый передатчиком и значительно менее мощный эхо-сигнал.
Измерение дальности до цели сводится к измерению отрезка времени между моментом излучения импульса и моментом приёма, то есть временем движения импульса до цели и обратно.
Охота на «стелс» и гиперзвук
На практике «Резонанс-НЭ» способна обнаруживать широкий класс воздушных целей — самолёты стратегической и оперативно-тактической авиации, вертолёты, крылатые и баллистические ракеты, аэростаты. Однако основной «специализацией» отечественной станции являются самолёты-невидимки, крылатые ракеты и гиперзвуковые изделия.
В РЛС реализован принцип резонансного отражения радиоволн, который приводит к резкому увеличению показателя эффективной отражающей поверхности (ЭОП) воздушных объектов. Таким образом система безошибочно фиксирует летательные аппараты, выполненные по технологии «стелс», и передаёт данные по ним на огневые средства поражения.
- Слайд из презентации ЗАО НИЦ «Резонанс»
По расчётам московских инженеров, ЭОП типичной крылатой ракеты для радаров, использующих эффект Релея, составляет порядка 0,05 кв. м, а для «Резонанса-НЭ» — 15 кв. м.
«Указанное явление делает неэффективной технологию «стелс» и практически снимает вопрос с малозаметностью таких воздушных объектов, как (американские. — RT) самолёты F-117, B-2, F-35 и аналогичных им», — говорится в материалах ЗАО НИЦ «Резонанс».
Ситуация с обнаружением и сопровождением гиперзвуковых объектов более сложная, отметил в беседе с RT генеральный директор предприятия Иван Назаренко. Однако возможности «Резонанс-НЭ» позволяют решать эту задачу за счёт сокращения до одной секунды темпового обращения к цели (темп обновления информации). На других РЛС этот показатель составляет примерно десять секунд.
Также по теме
Скоростной перехват: какое российское оружие сможет уничтожать гиперзвуковые цели
Российская оборонная промышленность обладает необходимыми ресурсами для создания комплекса перехвата гиперзвуковых аппаратов. Такой…
«Естественно, гиперзвуковое изделие быстро летит, и другие радары попросту не успевают за ним. Наше темповое обращение позволяет своевременно отслеживать такие цели. Гиперзвуковой аппарат попадает в энергетическое поле, которое излучает локатор. Оператор станции может видеть такой объект на экране, он подсвечивается красным цветом», — рассказал Назаренко.
Как пояснил руководитель ЗАО НИЦ «Резонанс», подобная РЛС занимает важную нишу в системе противовоздушной обороны России. По оценке Назаренко, на сегодняшний день отечественная станция является самым надёжным средством передачи информации по гиперзвуковым изделиям на комплексы борьбы с ними.
В беседе с RT замглавы ЗАО НИЦ «Резонанс» доктор технических наук Александр Щербинко обратил внимание на когнитивную функцию РЛС. Она заключается в том, что вычислительное оборудование станции анализирует результаты работы по обнаружению воздушных целей, выявляет ошибки и исправляет их
По его словам, в настоящее время в Арктике развёрнуты пять когнитивных радиолокационных станций. Ещё столько же РЛС «Резонанс-НЭ» появится в российском Заполярье в ближайшие годы. При этом системы, которые поставляются зарубежным государствам, лишены искусственного интеллекта.
«Резонанс-НЭ» может эксплуатироваться практически в любых природно-климатических условиях. Радиолокационная система выдерживает температуру от -50 °С до +60 °С, порывы ветра до 50 м/c, плотность выпадения осадков до 300 мм/ч, влажность до 95% при +25 °С.
Как правило, на местности «Резонанс-НЭ» развёрнут в форме квадрата из четырёх модулей. Однако по желанию заказчика РЛС может быть собрана в одномодульном, двухмодульном или трёхмодульном вариантах с секторами обзора 90°, 180° и 270° соответственно.
- Экспортная РЛС «Резонанс-НЭ» в одной из зарубежных стран
Конструкционно этот грузовик можно разделить на четыре части
Типы боеприпасов
Многообразие модельного ряда ЗИЛ-164

За годы выпуска ЗИЛ-164 было создано множество модификаций этого грузовика. Большинство из них использовалось на стройках и в сельском хозяйстве. Вот основные модели этого популярного в 1960-х годах автомобиля:
- Базовые модели ЗИЛ-164 представляют собой бортовой грузовик. Имеют деревянный кузов с тремя откидными бортами;
- ЗИЛ-164Р– это усовершенствованная модель, которая имеет более мощный двигатель, развивающий до 109 л.с. Кроме двигателей, они отличались карбюраторами модели МКЗ-К-84. Эти модификации специально предназначались для работы в качестве тягачей, которые могли буксировать прицепы массой до 4,5 тонн. Если грузовик базовой модификации не рекомендовалось постоянно эксплуатировать с прицепом, то эта модель предназначалась именно для этого;
- ЗИЛ-164Д – специальные модификации бортовых автомобилей, оснащённые экранированным электрооборудованием;
- ЗИЛ-164Г – шасси, на которое устанавливалось специальное оборудование и грузовые платформы различного типа, предназначенные для специфических нужд;
- ЗИЛ-ММЗ-164Н представляет собой настоящий седельный тягач. Тоже оснащён новым карбюратором и форсированным мотором;
- ЗИЛ-ММЗ-585И – строительный самосвал;
- ЗИЛ-ММЗ-5875К – сельскохозяйственный самосвал.
Кроме того, завод имени Лихачёва пошёл на интересный эксперимент и начал выпускать грузовики, предназначенные для эксплуатации на сжиженном газе. Это были модификации ЗИЛ-156А, ЗИЛ-166 и ЗИЛ-166А. Технические характеристики данного автомобиля позволяли эксплуатировать его не только на газу, но и на бензине. Так как производство бензина в 60-х годах было избыточным, а сам он стоил копейки, то газовые модификации встречались крайне редко.
ТТХ
См. также
Принимаемая мощность
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
Дальность действия радиолокатора с активным ответом
Активный ответ приходит от радиолокационного ответчика (ретранслятора), установленного на цели.
Максимальная дальность действия по каналу запроса
- Dreq.max=PreqGreqAr4πPr.min{\displaystyle D_{req.max}={\sqrt {{P_{req}G_{req}A_{r}} \over {4\pi P_{r.min}}}}}
Максимальная дальность действия по каналу ответа
- Dresp.max=PrespGrespAr4πPr.min{\displaystyle D_{resp.max}={\sqrt {{P_{resp}G_{resp}A_{r}} \over {4\pi P_{r.min}}}}}
При работе с активным ответом, расстояние входит в формулы со степенью 2, а не 4, так как мощность ответчика является фиксированной и не зависит от мощности падающего на «цель» излучения радара. В случае же пассивного ответа, цель, согласно принципу Гюйгенса-Френеля, представляет собой вторичный переизлучатель, мощность которого прямо пропорциональна падающему на него излучению радара. Таким образом, при пассивной радиолокации сигнал от передатчика радара по пути к цели ослабевает в 4πRt2{\displaystyle 4\pi R_{t}^{2}} раз, отражается, а затем по пути от цели до приемника радара ослабевает еще в 4πRr2{\displaystyle 4\pi R_{r}^{2}}. В результате получаем коэффициент (4π)2Rt2Rr2{\displaystyle {(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}, и в случае, когда Rt = Rr = R, этот коэффициент равен (4π)2R4{\displaystyle {(4\pi )}^{2}R^{4}}.
ЗиС-150: история создания – начало
История «полтораста» началась еще в 1937 году, когда под руководством Е.И. Важинского появился проект автомобиля ЗиС-15 – нового грузовика, которым планировалось уже тогда заменить устаревающий ЗиС-5.
ЗиС-15 был гораздо мощнее своего предшественника. Грузоподъемность машины составляла 5 тонн, кабина стала трехместной и приобрела более совершенные, для своего времени, обтекаемые формы. Но к 1939 году, уже без Важинского, который был репрессирован в 1938-ом, автомобиль получил ряд доработок. В новом варианте КПП стала пятиступенчатой, на 1 тонну снижена грузоподъемность, а также внесены изменения во внешний облик машины. В таком виде, в 1940 году, грузовик представили на выставке народного хозяйства (позже переименованным в ВДНХ) в Москве, после которой автомобиль начали готовить к массовому производству. Причем ЗиС-15 должен был стать базовой моделью еще для целого ряда машин: трехтонника ЗиС-23, внедорожника ЗиС-24, двух газогенераторных – ЗиС-25 и ЗиС-28, седельного тягача ЗиС-26, а также автобуса с вагонной компоновкой ЗиС-17. Но планам не суждено было осуществиться – пришел 1941 год, а вместе с ним война. Работа над новой машиной остановилась.
ВОГ-25/ВОГ-25П и другие 40-мм выстрелы
Модификации
ВОГ-25ИН
Индекс ГРАУ — 7П17И
. Практический выстрел с гранатой в инертном снаряжении, применяется для тренировок и обучения стрельбе,а также приведения ГП-25 к нормальному бою и проверке боя.
ВУС-25
(индекс 7П44У) — учебная граната, применяется для тренировок и обучения.
ВОГ-25П
Индекс ГРАУ — 7П24
, шифр «Подкидыш». Выстрел с «подпрыгивающей» осколочной гранатой, оснащённый взрывателемВГМ-П с вышибным зарядом и пиротехническим замедлителем. Принят на вооружение в 1979 году.
При попадании в преграду выстрел подскакивает и взрывается в воздухе на высоте около 1,5 метров. В сравнении с ВОГ-25, «подпрыгивающий» боеприпас позволяет эффективнее поражать лежащего и находящегося в траншее или окопе противника.
Описание:
- Калибр 40 мм
- Начальная скорость 76 м/с
- Масса 275 г
- Масса ВВ 42 г
- Длина 125 мм
- Дистанция взведения 10 — 40 м
- Время самоликвидации не менее 14 с
- Средняя высота разрыва 75 см
«Гвоздь»
40-мм выстрел «Гвоздь»
с газовой гранатой — предназначен для создания газового облака с непереносимо-допустимой концентрацией ирританта (раздражающего вещества) CS. Состоит на вооружении МВД РФ.
40-мм выстрел с дымовой гранатой ВДГ-40 «Нагар»
— применяется для постановки дымовой завесы.
ВОГ-25М
Модернизированный вариант выстрела ВОГ-25 с осколочной гранатой, частично унифицирован с ВОГ-25ПМ. Разработан в начале 2000-х годов.
ВОГ-25ПМ
Модернизированный вариант выстрела ВОГ-25П с «подпрыгивающей» осколочной гранатой, частично унифицирован с ВОГ-25М. Разработан в начале 2000-х годов.
АСЗ-40
40-мм выстрел акустического действия АСЗ-40 «Свирель»
. Светозвуковая граната нелетального действия служит для временного подавления психоволевой устойчивости живой силы противника. Состоит на вооружении МВД РФ.
В настоящее время имеет место тенденция к дальнейшему расширению типов боеприпасов. Так, на международной оружейной выставке «Defendory-2006» были представлены новые виды гранат:
- ВГ-40МД — выстрел с дымовой гранатой
- ВГС-40-1 — выстрел с сигнальной гранатой (красный огонь)
- ВГС-40-2 — выстрел с сигнальной гранатой (зеленый огонь)
- ВГ-40И — выстрел с осветительной гранатой
Однако нет сведений, что эти боеприпасы были приняты на вооружение или находятся в серийном производстве.
Операторы
Классификация
Выделяют два вида радиолокации:
- Пассивная радиолокация основана на приёме собственного излучения объекта;
- При активной радиолокации радар излучает свой собственный зондирующий сигнал и принимает его отражённым от цели. В зависимости от параметров принятого сигнала определяются характеристики цели.
Активная радиолокация бывает двух видов:
Активная радиолокация с пассивным ответом
- С активным ответом — на объекте предполагается наличие радиопередатчика (ответчика), который излучает радиоволны в ответ на принятый сигнал. Активный ответ применяется для опознавания объектов (свой-чужой), дистанционного управления, а также для получения от них дополнительной информации (например, количество топлива, тип объекта и т. д.);
- С пассивным ответом — запросный сигнал отражается от объекта и воспринимается в пункте приёма как ответный.
Для просмотра окружающего пространства РЛС использует различные способы обзора за счёт перемещения направленного луча антенны РЛС:
- круговой;
- секторный;
- обзор по винтовой линии;
- конический;
- по спирали;
- «V» обзор;
- линейный (самолёты ДРЛО типа Ан-71 и А-50 (Россия) или американские с системой Авакс).
В соответствии с видом излучения РЛС делятся на:
- РЛС непрерывного излучения;
- Импульсные РЛС.
Российский внедорожник ГАЗ-3106
Отличия ЗИЛ-164 от ЗИС-150
Новый грузовик создавался на заводе имени Лихачёва в качестве приемника ЗИС-150, который на то время считался достаточно устаревшим. Хотя последние модификации ЗИС-150 практически не отличались от первых ЗИЛ-164, партия требовала не очередной модернизации, а создания абсолютно новой модели, поэтому в 1957 году на базе ЗИС конструкторы создали новый автомобиль.
Его внешность сразу наводила мысли о том, что это модернизированный ЗИС, но некоторые отличия в конструкции моделей всё же имелись:
- Рама автомобиля стала мощнее;
- Двигатель тоже был более мощным;
- Установили карбюратор новой модели;
- Появились телескопические амортизаторы;
- Появилась системе обдува ветровых стёкол;
- Отопитель новой конструкции.
Кроме того, в конструкцию автомобиля было внесено ещё множество различных мелких изменений, которые незаметны с первого взгляда. Например, новый радиатор, более высокие крылья и т.п.
Машина стала выпускаться серийно с 1957 года, и выпускалась до 1964 года. В 1961 году произошла серьёзная модернизация автомобиля, так как на заводе готовились к выпуску совершенно нового грузовика ЗИЛ-130. С 1961 года завод выпускал модель ЗИЛ-164А, который получил часть узлов от новой, более совершенной модели. Последняя модификация получила новое однодисковое сцепление, карданы, тормозной кран. Кроме того, КПП ЗИЛ-164А тоже была взята от модели с индексом 130.
В некоторых источниках указывается, что первые модификации ЗИЛ-164 назывались ЗИС, но это неправда. Завод переименовали в 1956 году, первые автомобили сошли с конвейера только через год после этого, а вот ЗИС-150 действительно назывался ЗИЛ. Последние модели, которые выпускались в 1956 году, имели надпись «ЗИЛ».
Эстафета переходит в Германию
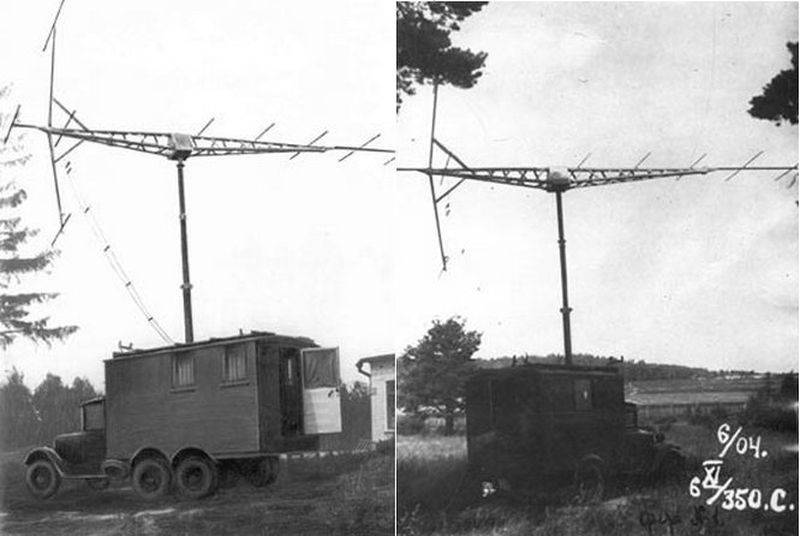
В 1904 году немец Христиан Хюльсмейер запатентовал устройство под названием телемобилоскоп. Этот прибор предполагалось использовать в судоходстве для обнаружения кораблей в условиях плохой видимости. Телемобилескоп был построен на основе искрового генератора радиоволн и в своей последней версии мог находить суда на расстоянии до 3 км. Однако устройством не заинтересовались ни гражданские, ни военные, предпочитая по старинке пользоваться на судах паровыми ревунами. По сути прибор Хюльсмайера был еще не радаром, а радиодетектором. Существовавшие на тот момент технологии еще не позволяли построить полноценный радиолокатор.
Схема установки антенны радиолокатора «Зеетакт» на немецкой подводной лодке
В 1920-1930-е годы немецкие ученые и инженеры достигли больших успехов в развитии военной радиолокации. В 1935 году физик Рудольф Кунхольд из Института технологий связи германских ВМС представил радиолокационный прибор с электронно-лучевым дисплеем. К концу 1930-х на его основе были созданы оперативные радиолокаторы «Зеетакт» для флота и «Фрейя» для ПВО.
Однако, несмотря на значительные научные результаты, руководство Третьего рейха рассчитывало на блицкриг и не спешило развивать национальную сеть радаров, считая их преимущественно оборонительными средствами. К 1940 году Германия располагала лишь небольшой сетью станций дальнего обнаружения. И только к концу 1943 года территорию Германии полностью накрыли защитным радиолокационным «колпаком».
Принимаемая мощность[ | код]
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
Дальность действия РЛС
Основная статья: Основное уравнение радиолокации
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы.
В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
- Dmax=PnDaSaσ(4π)2Pn.min4{\displaystyle D_{max}={\sqrt{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}},
где:
- Pn{\displaystyle \;P_{n}} — мощность генератора;
- Da{\displaystyle \;D_{a}} — коэффициент направленного действия антенны;
- Sa{\displaystyle \;S_{a}} — эффективная площадь антенны;
- σ{\displaystyle \;\sigma } — эффективная площадь рассеяния цели;
- Pn.min{\displaystyle \;P_{n.min}} — минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Влияние помех
Работа нескольких РЛС в одном частотном диапазоне
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.
Мнимое изображение
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте
Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда.
Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды.
Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
Заключение
Мы рассмотрели принцип радиотелефонной связи, телевидения и радиолокацию. На следующем уроке обсудим свойства электромагнитных узлов.
Список литературы
- Тихомирова С.А., Яворский Б.М. Физика (базовый уровень) – М.: Мнемозина, 2012.
- Генденштейн Л.Э., Дик Ю.И. Физика 10 класс. – М.: Мнемозина, 2014.
- Кикоин И.К., Кикоин А.К. Физика-9. – М.: Просвещение, 1990.
Домашнее задание
- Дать определение радиотелефонной связи.
- Каков принцип работы радиотелефонной связи?
- Каков принцип работы радиолокатора?
Дополнительные рекомендованные ссылки на ресурсы сети Интернет
- Интернет-портал Ucheba-legko.ru (Источник).
- Интернет-портал All-he.ru (Источник).
- Интернет-портал Femto.com.ua (Источник).
ВЫВОДЫ
Дальность действия РЛС тем больше, чем больше мощность излучения Ри, коэффициент усиления G и эффективная площадь антенны Sa, эффективная отражающая поверхность цели σ и чем меньше абсолютная величина чувствительности приемника Рпр.min.
Наибольший эффект для увеличения Дmaxдает увеличение геометрических размеров антенны G и Sa, где для увеличения Дmax в два раза достаточно увеличить площадь антенны в 4 раза. Но геометрические размеры ограничиваются конструктивными особенностями антенных устройств. Наименьший эффект для увеличения Дmaxдает увеличение Ри ,σ, Рпр.min , так как для увеличения Дmax в два раза их надо увеличивать в 16 раз.